The study of Physics Topics has helped humanity develop technologies like electricity, computers, and space travel.
What is the Direction Cosine Formula?
Let the magnitude and direction of a vector in \(\vec{r}\), space, be represented by \(\overrightarrow{O P}\) [Fig.]. Our aim here is to find out an elegant representation of \(\vec{r}\).

O is taken as the origin of the 3-dimensional space and three mutually perpendicular axes x, y and z are drawn. A special rule is followed to indicate the directions of the three axes. If we hold the first 3 fingers of our right hand at right angles to one another, then the forefinger points towards the x -axis, middle finger towards the y -axis and thumb towards the z -axis. This is called the right handed cartesian coordinate system.
Here, the origin O (0, 0, 0) is the initial point, and P (x, y, z) is the end point of the vector \(\overrightarrow{O P}\). Taking the line segment OP as a diagonal, the cuboid ADPEOBFC is drawn. The projections of the vector \(\vec{r}\) along the three axes are, from Fig., OA = x, OB = AD = y and OC = DP = z. These x, y and z are three mutually perpendicular components of the vector \(\vec{r}\).
When the line segments OA, AD and DP are taken as vectors, the three-dimensional polygon OADP gives, as per the law of polygon of vector addition,
\(\overrightarrow{O A}\) + \(\overrightarrow{A D}\) + \(\overrightarrow{D P}\) = \(\overrightarrow{O P}\) ….. (1)
If \(\hat{i}\), \(\hat{j}\), \(\hat{k}\) are the unit vectors along the x, y and z axes respectively in the positive direction,
\(\overrightarrow{O A}\) = x\(\hat{i}\), \(\overrightarrow{A D}\) = y\(\hat{j}\) and \(\overrightarrow{D P}\) = z\(\hat{k}\)
Since, \(\vec{r}\) = \(\overrightarrow{O P}\), from equation (1)
\(\vec{r}\) = x\(\hat{i}\) + y\(\hat{j}\) + z\(\hat{k}\) …… (2)
\(\vec{r}\) is the position vector of the point P w.r.t origin O.
Equation (2) shows the algebraic representation of a position vector with initial point (0, 0, 0) and final point (x, y, z).
Determination of the magnitude of the vector:
From the geometrical property of a cuboid (reference Fig.),
(diagonal)2 = (length)2 + (breadth)2 + (height)2
or, OP2 = 0A2 + OB2 + OC2 or, r2 = x2 + y2 + z2
or, r = \(\sqrt{x^2+y^2+z^2}\) ….. (3)
Hence, the magnitude or value of a vector with its initial point as the origin can be determined easily with the help of the coordinates of its terminal point.
Direction Cosine: Let \(\overrightarrow{O P}\) be inclined at an angle α with the x-axis [Fig.], i.e., ∠POA = α. As per the property of the cuboid, OAP is a right angled triangle with ∠OAP = 90°. Hence,
cosα = \(\frac{O A}{O P}\) = \(\frac{x}{r}\) = l (say) ….. (4)
Similarly, if \(\overrightarrow{O P}\) makes angles β and γ with y and z axes respectively,

From (4) and (5),
l2 + m2 + n2 = cos2α + cos2β + cos2γ = \(\frac{x^2}{r^2}\) + \(\frac{y^2}{r^2}\) + \(\frac{z^2}{r^2}\)
= \(\frac{x^2+y^2+z^2}{r^2}\) = \(\frac{r^2}{r^2}\) = 1 ….. (6)
[with the help of equation (3)]
Hence, to know the direction of the vector, the angles α, β, γ can be determined using equations (4) and (5). cosα, cosβ, cosγ or l, m, n are called the direction cosines of vector with respect to the axes x, y, z respectively. Equation (6) indicates the relationship among the direction cosines.
Sum and difference of two vectors: Let \(\overrightarrow{r_1}\) = \(x_1 \hat{i}\) + \(y_1 \hat{j}\) + \(z_1 \hat{k}\) and \(\overrightarrow{r_2}\) = \(x_2 \hat{i}\) + \(y_2 \hat{j}\) + \(z_2 \hat{k}\) be two vectors as in Fig.(a).
Sum or resultant of these two vectors is
\(\vec{r}_1+\vec{r}_2\) = (x1 + x2)\(\hat{i}\) + (y1 + y2\(\hat{j}\)) + (z1 + z2)\(\hat{k}\)
and its magnitude is,
\(\left|\vec{r}_1+\vec{r}_2\right|\) = \(\sqrt{\left(x_1+x_2\right)^2+\left(y_1+y_2\right)^2+\left(z_1+z_2\right)^2}\)
The direction of the resultant is specified by the direction cosines. They are

Similarly, the difference of the two vectors \(\overrightarrow{r_1}\) and \(\overrightarrow{r_2}\) can also be found out [Fig.(b)]. The resultant in this case will be

These relations are applied to determine the sum or difference of any number of vectors.
Discussions:
i) Equation (2) represents the 3-dimensional cartesian form of any vector \(\vec{r}\). However, the symbol \(\vec{r}\) is usually reserved for the position vector of a particle.
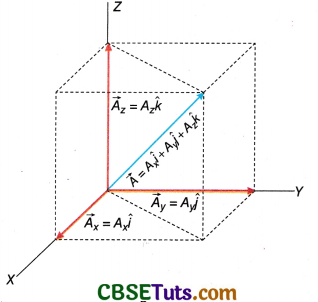
Any vector \(\vec{A}\) is represented in the system as
\(\vec{A}\) = Ax\(\hat{i}\) + Ay\(\hat{j}\) + Az\(\hat{k}\) ….. (7)
where Ax, Ay and Az stand for the x, y and z components respectively of the vector \(\vec{A}\) [Fig.]. Then, the magnitude of \(\vec{A}\) is
A = \(\sqrt{A_x^2+A_y^2+A_z^2}\) …… (8)
The direction cosines, respectively, are
l = \(\frac{A_x}{A}\), m = \(\frac{A_y}{A}\) and n = \(\frac{A_z}{A}\) ….. (9)
with l2 + m2 + n2 = 1 ….. (10)
ii) This is an example of resolution of a vector latex]\vec{A}[/latex] into three components Ax\(\hat{i}\), Ay\(\hat{j}\) and Az\(\hat{k}\). In section 2.7, we dealt with coplanar vectors, and It was sufficient to resolve a vector into two components only. But, for a system of non-coplanar vectors, it is absolutely necessary to resolve each vector into three mutually perpendicular components.
iii) Once every vector under consideration in a problem can be represented in the form of equation (7), vector geometry essentially transforms into vector algebra and geometrical figures and rules are no longer necessary. Whereas vector geometry is practicable only for a few vectors, there is no limit on the number of vectors that can be handled with the help of vector algebra.
Numerical Examples
Example 1.
Coordinates of the end point of a vector \(\overrightarrow{O P}\) is (4, 3, -5). Express the vector in terms of its coordinates and find its absolute value.
Solution:
If the coordinates of P is (x, y, z) then,
\(\overrightarrow{O P}\) = x\(\hat{i}\) + y\(\hat{j}\) + z\(\hat{k}\)
Here, x = 4y = 3 and z = -5
∴ \(|\overrightarrow{O P}|\) = 4\(\hat{i}\) + 3\(\hat{j}\) – 5\(\hat{k}\)
and the absolute value of the vector,
OP = \(|\overrightarrow{O P}|\) = \(\sqrt{x^2+y^2+z^2}\)
= \(\sqrt{4^2+3^2+(-5)^2}\)
= \(\sqrt{16+9+25}\) = \(\sqrt{50}\) = 5\(\sqrt{2}\)
Example 2.
Find the magnitude of the vector \(\vec{A}\) = \(\hat{\boldsymbol{i}}\) – 2\(\hat{\boldsymbol{j}}\) + 3\(\hat{\boldsymbol{k}}\). Also find the unit vector In the direction of \(\vec{A}\). [HS (old syllabus) ‘07]
Solution:
Magnitude of \(\vec{A}\), A = \(\sqrt{1^2+(-2)^2+3^2}\) = \(\sqrt{14}\)
Unit vector in the direction of \(\vec{A}\) is
\(\hat{n}\) = \(\frac{\vec{A}}{A}\) = \(\frac{1}{\sqrt{14}} \hat{i}\) – \(\frac{2}{\sqrt{14}} \hat{j}\) + \(\frac{3}{\sqrt{14}} \hat{k}\)
Example 3.
Vectors \(\vec{A}\) and \(\vec{B}\) can be expressed as \(\vec{A}\) = 10\(\hat{i}\) – 12\(\hat{j}\) + 5\(\hat{k}\) and \(\vec{B}\) = 7\(\hat{i}\) + 8\(\hat{j}\) – 12\(\hat{k}\), where \(\hat{i}\), \(\hat{j}\), \(\hat{k}\) are unit vectors along x, y, z axes respectively. Find the resultant of the two vectors and its magnitude.
Solution:
The resultant vector
\(\vec{C}\) = \(\vec{A}\) + \(\vec{B}\) = (10 + 7)\(\hat{i}\) + (-12 + 8)\(\hat{j}\) + (5 – 12)\(\hat{k}\)
or, \(\vec{C}\) = 17\(\hat{i}\) – 4\(\hat{j}\) – 7\(\hat{k}\)
Magnitude of the resultant,
C = \(\sqrt{17^2+(-4)^2+(-7)^2}\) = \(\sqrt{354}\) = 18.81.
Example 4.
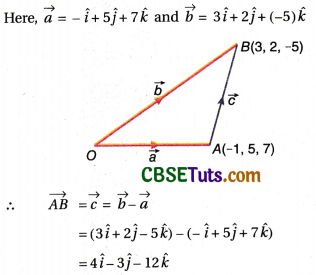
Position coordinates of A and B are (-1, 5, 7) and (3, 2, -5) respectively. Express \(\overrightarrow{A B}\) in terms of position coordinates.
Solution:
Let O be the origin, \(\overrightarrow{O A}\) = \(\vec{a}\), \(\overrightarrow{O B}\) = \(\vec{b}\) and \(\overrightarrow{A B}\) = \(\vec{c}\) = \(\overrightarrow{O B}\) – \(\overrightarrow{O A}\) = \(\vec{b}\) – \(\vec{a}\) [Fig.].
Example 5.
3\(\hat{i}\) + 4\(\hat{j}\) + 12\(\hat{k}\) is a vector. Find the magnitude of the vector and the angles it makes with x, y and z axes. [WBJEE 2000]
Solution:
If \(\vec{r}\) = x\(\hat{i}\) + y\(\hat{j}\) + z\(\hat{k}\), then the magnitude \(|\vec{r}|\) = \(\sqrt{x^2+y^2+z^2}\)
∴ Magnitude of the vector 3\(\hat{i}\) + 4\(\hat{j}\) + 12\(\hat{k}\) is,
a = \(\sqrt{3^2+4^2+12^2}\) = \(\sqrt{169}\) = 13
Let the corresponding angles the vector makes with the x, y and z axes be α, β and γ respectively,
From definitions,
cosα = \(\frac{x}{a}\) = \(\frac{3}{13}\) or, α = cos-1\(\frac{3}{13}\)
cosβ = \(\frac{y}{a}\) = \(\frac{4}{13}\) or, β = cos-1\(\frac{4}{13}\)
cosγ = \(\frac{z}{a}\) = \(\frac{12}{13}\) or, γ = cos-1\(\frac{12}{13}\)
Example 6.
Two vectors \(\overrightarrow{\boldsymbol{A}}\) and \(\overrightarrow{\boldsymbol{B}}\) are \(\overrightarrow{\boldsymbol{A}}\) = 5\(\hat{i}\) + 3\(\hat{j}\) – 4\(\hat{k}\) and \(\overrightarrow{\boldsymbol{A}}\) + \(\overrightarrow{\boldsymbol{B}}\) and \(\overrightarrow{\boldsymbol{A}}\) – \(\overrightarrow{\boldsymbol{B}}\). [HS (XI) ’06]
Solution:
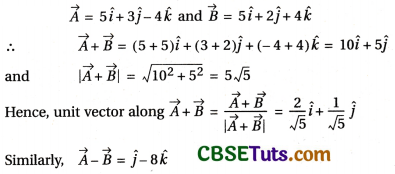
and \(|\vec{A}-\vec{B}|\) = \(\sqrt{1^2+(-8)^2}\) = \(\sqrt{65}\)
and unit vector along \(\vec{A}-\vec{B}\) = \(\frac{\vec{A}-\vec{B}}{|\vec{A}-\vec{B}|}\) = \(\frac{1}{\sqrt{65}} \hat{j}\) – \(\frac{8}{\sqrt{65}} \hat{k}\)
Example 7.
Two velocities \(\vec{\nu}_1\) and \(\vec{\nu}_2\) are 3 m/s towards north and 4 m/s towards east, respectively. Find \(\vec{\nu}_1\) – \(\vec{\nu}_2\).
Solution:
Let us choose, x-axis along east and y-axis along north.
∴ \(\overrightarrow{v_1}\) = 3\(\hat{j}\) m/s and \(\overrightarrow{v_2}\) = 4\(\hat{i}\) m/s
∴ \(\overrightarrow{v_1}\) – \(\overrightarrow{v_2}\) = -4\(\hat{i}\) + 3\(\hat{j}\) (between west and north)
\(\left|\vec{v}_1-\vec{v}_2\right|\) = \(\sqrt{(-4)^2+3^2}\) = 5 m/s
If \(\vec{v}_1-\vec{v}_2\) makes an angle θ with east, then tanθ = \(\frac{3}{-4}\) = tan 143.1° = tan(180° – 36.9°)
∴ \(\vec{v}_1-\vec{v}_2\) is inclined at an angle of 143.1° north of east, i.e., 36.9° north of west.
Example 8.
Find out the resultant of the following three displacement vectors: \(\vec{A}\) = 10 m, aloñg north-west; \(\vec{B}\) = 20 m, 30° north of east; \(\vec{C}\) = 35 m, along south.
Solution:
Let us choose, x-axis along east and y-axis along north. Taking into account the x- and y-components of the given vectors, they can be written as (in metre),

Example 9.
The characteristic equation of a particle moving in a curved path are: x = e-t, y = 2cos3t and z = 2sin3t, where t stands for time. Find out
(i) velocity and acceleration at any instant,
(ii) velocity and acceleration at t = 0.
Solution:
Position vector of the particle at any instant,

Example 10.
The position vector \(\vec{r}\) of a particle with respect to the origin changes with time \(\vec{r}\) as \(\vec{r}\) = At\(\hat{\boldsymbol{i}}\) – Bt2\(\hat{\boldsymbol{j}}\), where A and B are positive constants. Determine
(i) the locus of the particle,
(ii) the nature of variation with time of the velocity and acceleration vectors, and also the moduli of them.
Solution:
i) \(\vec{r}\) = At\(\hat{i}\) – Bt2\(\hat{j}\) = x\(\hat{i}\) + y\(\hat{j}\)
∴ x = At and y = -Bt2
Then, x2 = A2t2 or, t2 = \(\frac{x^2}{A^2}\)
also, t2 = \(-\frac{y}{B}\)
∴ \(\frac{x^2}{A^2}\) = \(-\frac{y}{B}\) or, x2 = \(-\frac{A^2}{B} y\)
This is the locus of the particle, which is a parabola.
ii) Velocity, \(\vec{v}\) = \(\frac{d \vec{r}}{d t}\) = A\(\hat{i}\) – 2Bt\(\hat{j}\)
Its modulus, \(|\vec{v}|\) = \(\sqrt{A^2+(-2 B t)^2}\) = \(\sqrt{A^2+4 B^2 t^2}\)
Acceleration, \(\vec{a}\) = \(\frac{d \vec{v}}{d t}\) = -2B\(\hat{j}\)
Its modulus, \(|\vec{a}|\) = \(\sqrt{(-2 B)^2}\) = 2B